The EcoFAB devices consist of many different components. The following aspects must be considered if utilizing this technology in an experiment.

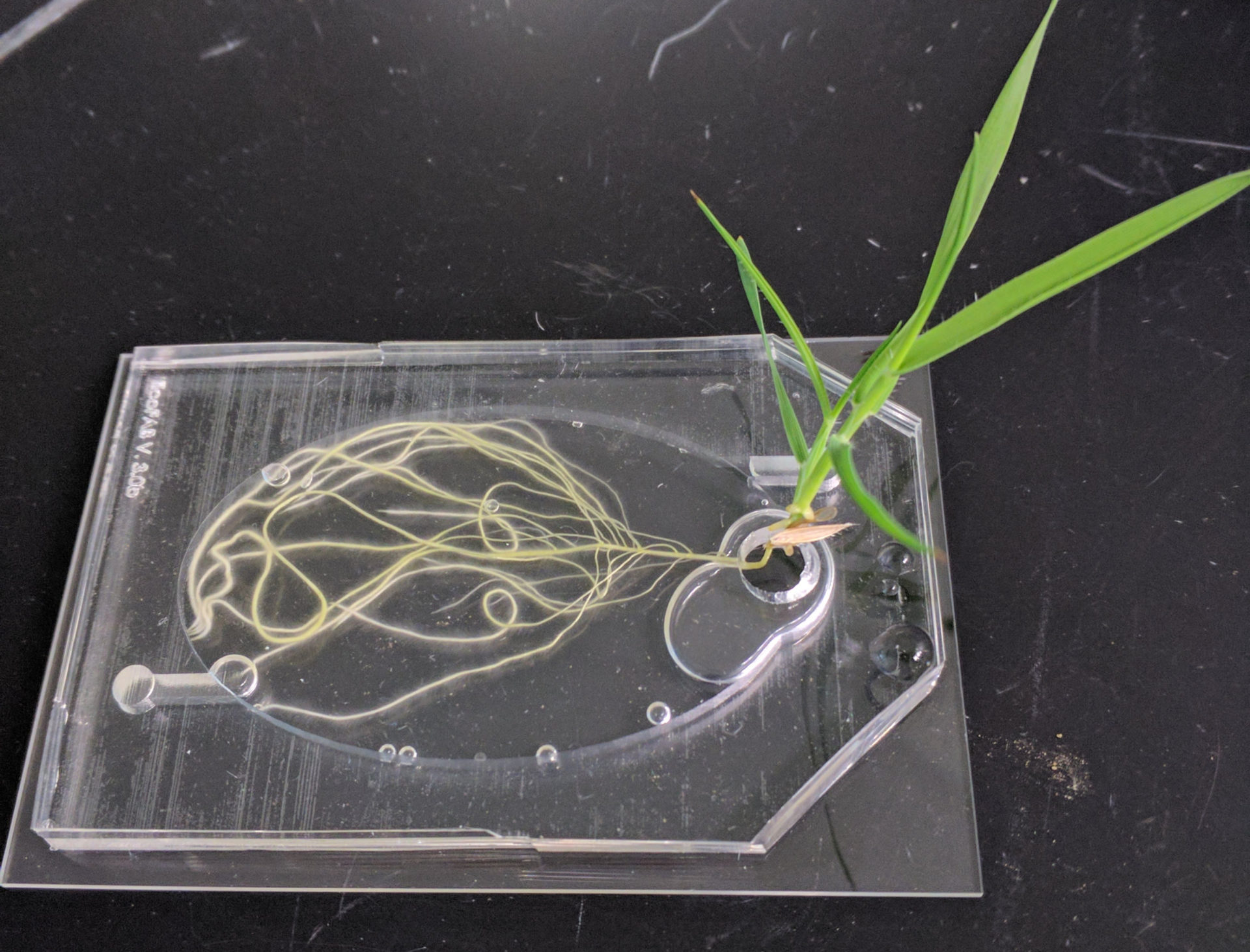
Injection molding allows for mass production and standardization of EcoFAB 2.0 parts for ease of assembly and reproducible experimentation. The chamber enables control of liquid flow through the chamber, spatially defined imaging of the root system, and the ability to sample and add microbes and materials to the root system in a spatially defined manner.
 The initial design of EcoFAB 1.0 relied on 3D printing of molds used to cast Polydimethylsiloxane (PDMS). The greatly improved EcoFAB 2.0 design is created with standardized mass production by injection molding and thus does not require microfabrication by users.
The initial design of EcoFAB 1.0 relied on 3D printing of molds used to cast Polydimethylsiloxane (PDMS). The greatly improved EcoFAB 2.0 design is created with standardized mass production by injection molding and thus does not require microfabrication by users.
 The native ecosystem that is serving as the reference system is one of the most critical aspects of the EcoFAB design. We envision a stable source of model soil and microbes and a long-term experimental site for validation of our findings.
The native ecosystem that is serving as the reference system is one of the most critical aspects of the EcoFAB design. We envision a stable source of model soil and microbes and a long-term experimental site for validation of our findings. It is desirable to use plants that are well characterized, genetically transformable, experimentally tractable and small enough to complete their lifecycle in the confines of a compact EcoFAB. A wide range of plants could be used, including plants of the genera Arabidopsis, Setaria, and Brachypodium, among many others.
It is desirable to use plants that are well characterized, genetically transformable, experimentally tractable and small enough to complete their lifecycle in the confines of a compact EcoFAB. A wide range of plants could be used, including plants of the genera Arabidopsis, Setaria, and Brachypodium, among many others. Bacteria should originate from the field site, either as isolates or intact communities, depending on the experimental goals. These isolates can be used to study binary plant-microbe interactions or to construct synthetic communities, whose phenotypes can be compared to the native, enriched communities. Genetic tools (transposon sequencing, double barcoded shotgun expression library sequencing) can be applied to these isolates to gain a mechanistic understanding of their roles in microbial and plant interactions.
Bacteria should originate from the field site, either as isolates or intact communities, depending on the experimental goals. These isolates can be used to study binary plant-microbe interactions or to construct synthetic communities, whose phenotypes can be compared to the native, enriched communities. Genetic tools (transposon sequencing, double barcoded shotgun expression library sequencing) can be applied to these isolates to gain a mechanistic understanding of their roles in microbial and plant interactions.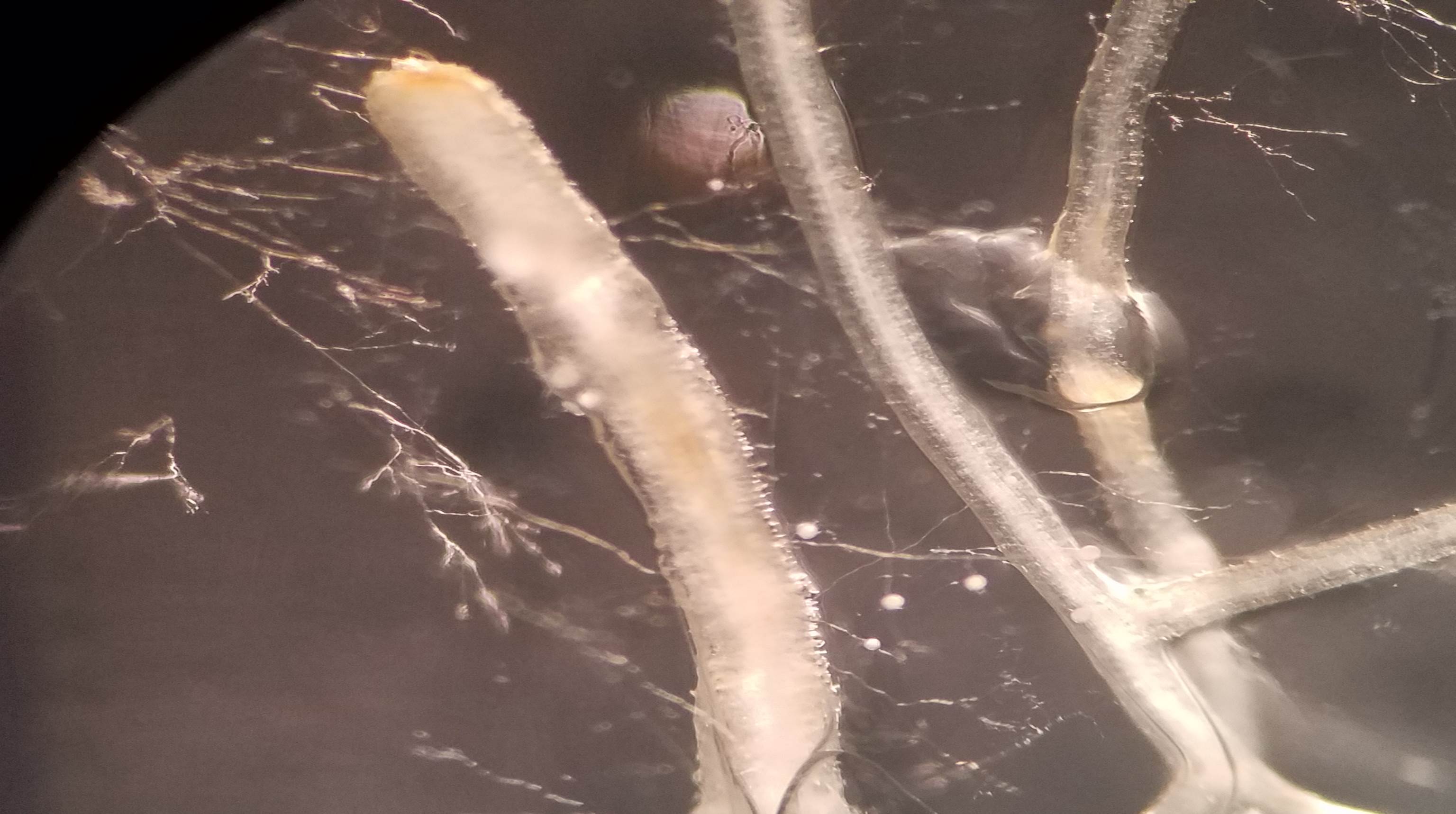 Tractability is a key concern for selecting model arbuscular mycorrhizal fungus (AMF) for inclusion in EcoFAB. For this reason, strong consideration should be given for selection of a model AMF species, such as Rhizophagus irregularis, for which a complete genome exists and spores can be easily obtained from existing AMF culture collections.
Tractability is a key concern for selecting model arbuscular mycorrhizal fungus (AMF) for inclusion in EcoFAB. For this reason, strong consideration should be given for selection of a model AMF species, such as Rhizophagus irregularis, for which a complete genome exists and spores can be easily obtained from existing AMF culture collections.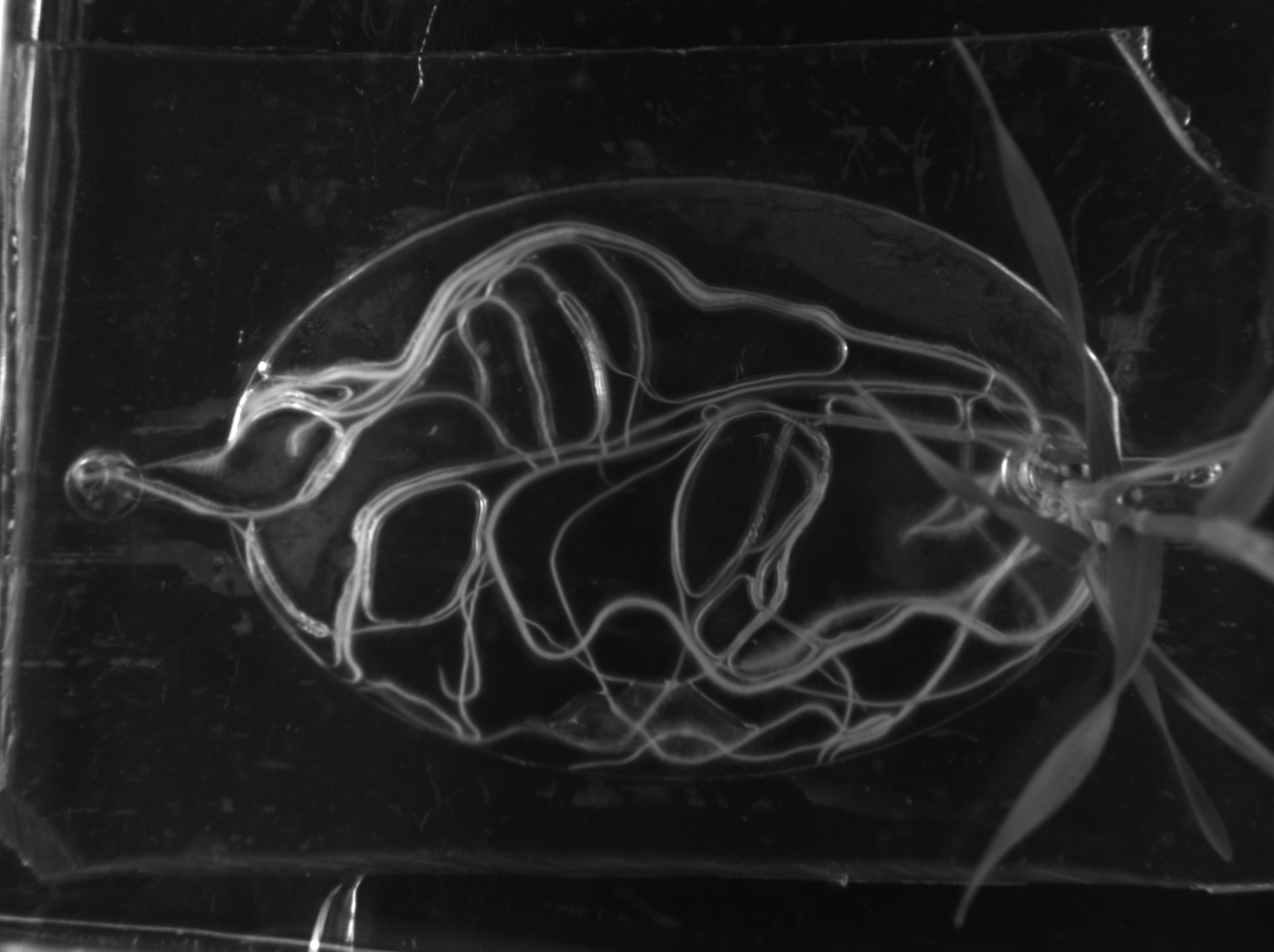 Small fauna (e.g. arthropods, annelids, mollusks and nematodes), microbial eukaryotes and protists, RNA and DNA viruses associated with the rhizosphere of plant represent an important addition to EcoFABs in that they play critical roles in soil carbon cycling and other nutrient cycling in the rhizosphere.
Small fauna (e.g. arthropods, annelids, mollusks and nematodes), microbial eukaryotes and protists, RNA and DNA viruses associated with the rhizosphere of plant represent an important addition to EcoFABs in that they play critical roles in soil carbon cycling and other nutrient cycling in the rhizosphere. Soil is one of the most difficult to control aspects of an EcoFAB design. Field soils are generally unsuitable for controlled experiments. An important research direction for EcoFABs is the development of synthetic soils. These can be a blend of acid washed quartz sand, defined organic amendments and synthetic clays to match the composition. Additionally, defined media based on biogeochemical analysis of soils may be used.
Soil is one of the most difficult to control aspects of an EcoFAB design. Field soils are generally unsuitable for controlled experiments. An important research direction for EcoFABs is the development of synthetic soils. These can be a blend of acid washed quartz sand, defined organic amendments and synthetic clays to match the composition. Additionally, defined media based on biogeochemical analysis of soils may be used.EcoBOT
In addition to EcoFAB devices, the EcoBOT is an automated system under development to conduct EcoFAB experiments to support the goals of the DOE-BER funded TEAMS project at LBNL. The instrument can control growth conditions, refill and sample from EcoFAB media chambers, and image plants. The EcoBOT consists of a liquid handling robot with a built in, custom growth chamber, imaging stations and a robotic arm that integrates these components. Once developed, the EcoBOT will maintain, sample and image EcoFABs over the course of an experiment. Learn more about the individual EcoBOT components, or watch videos of the EcoBOT in action.